



激光雷达是一种以发射激光束探测目标的位置、速度等特征量的雷达系统。原理是向目标发射探测激光束,然后将收到的从目标反射回来的目标回波与发射信号进行比较,作适当处理后,就可获得目标的有关信息。(激光雷达光束范围很窄,所以需要更多的纵向光束,以覆盖大的面积,所以线束决定着画面大小)。激光雷达也就是激光测距及其探测系统,是由四个基础组成部分:激光发射器、扫描器、接收器以及处理设备组成。激光雷达具有高精度、高分辨率的优势,同时具有建立周边3D模型的前景,然而其劣势在于对静止物体如隔离带的探测较弱且技术落地成本高昂。激光雷达可广泛应用于辅助驾驶系统,例如自适应巡航控制、前车碰撞警示及自动紧急制动。

市面上常见激光雷达分为很多种类,分别是:硅基MEMS、转镜、振镜+转镜、旋转透射棱镜,各个类型的特点如下:
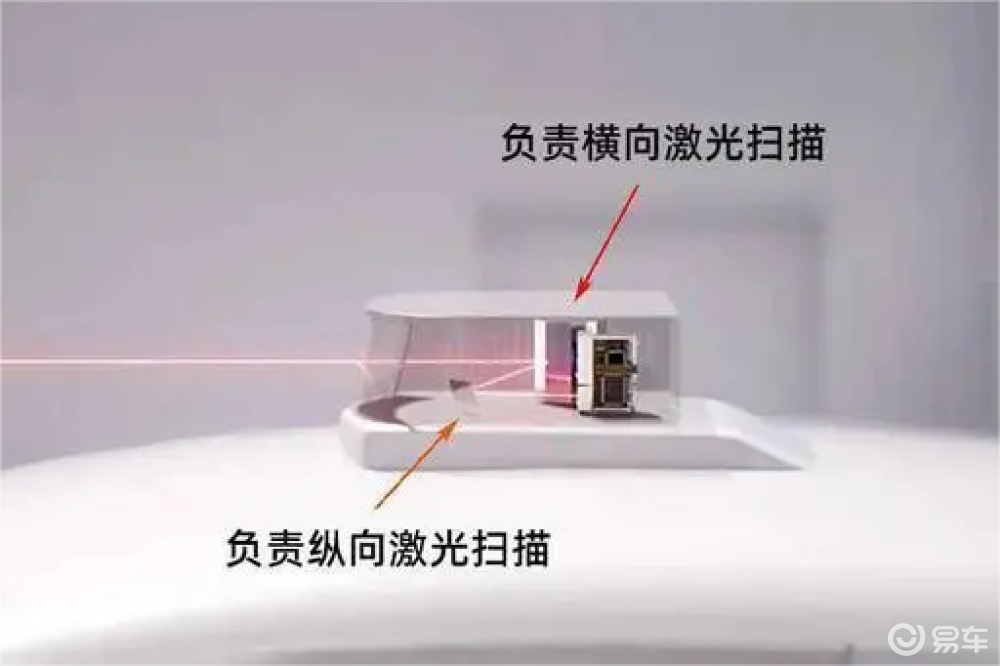
转镜:转镜分为一维转镜和二维转镜。一维转镜通过旋转的多面体反射镜,将激光反射到不同的方向;二维转镜顾名思义内部集成了两个转镜,一个多边棱镜负责横向旋转,一个负责纵向翻转,实现一束激光包揽横纵双向扫描。
MEMS:通过“振动”调整激光反射角度,实现扫描,激光发射器固定不动,但很考验接收器的能力,而且寿命同样是行业内的重大挑战。支撑振镜的悬臂梁角度有限,覆盖面很小,所以需要多个雷达进行共同拼接才能实现大视角覆盖,这就会在每个激光雷达扫描的边缘出现不均匀的畸变与重叠,不利于算法处理。
振镜+转镜:在转镜的基础上加入振镜,转镜负责横向,振镜负责纵向,满足更宽泛的扫射角度,频率更高价格相比前两者更贵,但同样面临寿命问题。振镜+转镜式激光雷达,我们可以理解为二维转镜负责纵向扫描的转镜,换为振镜。
棱镜:棱镜激光雷达也称为双楔形棱镜激光雷达,内部包括两个楔形棱镜,激光在通过第一个楔形棱镜后发生一次偏转,通过第二个楔形棱镜后再一次发生偏转。控制两面棱镜的相对转速便可以控制激光束的扫描形态。
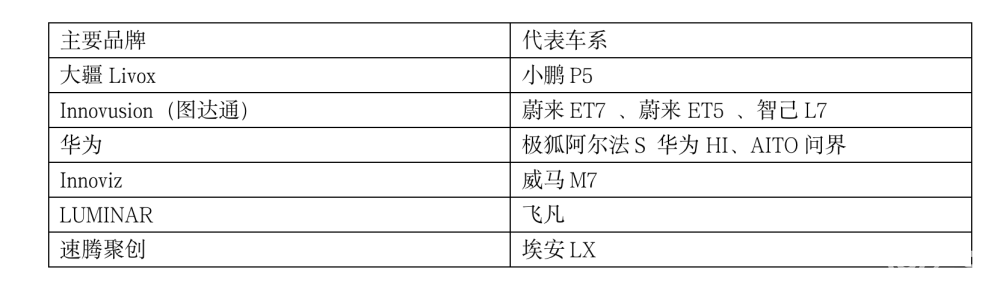
激光雷达的主要品牌有:VALEO法雷奥、禾赛科技、速腾聚创RoboSense、LUMINAR、华为HUAWEI、LIVOX、Velodyne Lidar、INNOVIZ、OUSTER等。
主要品牌介绍:
Innoviz :以色列激光雷达公司,成立于 2016 年,在 2018 年被宝马选为激光雷达供应商,2021 年 4 月通过 SPAC 方式在美国纳斯达克上市。
Livox:一家激光雷达传感器研发商,旗下拥有id—40和Mid—100系列,以及针对远距离探测的Tele—15和针对视场(FoV)的Horizon等产品,广泛应用于自动驾驶、机器人、无人机、测绘应用等领域。
Innovusion:图达通智能科技(苏州)有限公司专注于图像级超远距激光雷达,是世界领先的300线激光雷达提供商。Innovusion成立于2016年,在硅谷以及苏州和上海设有核心研发团队,生产制造中心位于宁波和武汉。
HI:华为旗下智能汽车解决方案品牌,该解决方案包括计算与通讯架构,智能座舱、智能驾驶,以及激光雷达在内的30个以上的智能化部件。
Velodyne:成立于1983年,是一家位于加州硅谷的技术公司。Velodyne最早以音响业务起家,随后业务拓展至激光雷达等领域。
车型举例:
优点 激光雷达传播速度快,根据不同物体反射角度不同,能够清晰区分开,测距远能够快速测算前方物体。
缺点 激光雷达无法穿透物体,因此被遮挡物体无法探测。此外车用规格产品加工精度要求高,成本大,寿命也有限。